|
The First Use of the Airborne Radio Compass
- The idea of using direction finding techniques for radio signal
location was already being used for maritime navigation and the military
had been experimenting with utilizing the same ideas for aviation
navigation. On July 6, 1920, the Navy had a Curtis-Felixstowe F-5-L
flying boat, with "Radio Compass" equipment installed, fly out of the
Hampton Roads area of Virginia (includes the city of Norfolk.) The F-5-L
was to navigate entirely by Radio Compass to a rendezvous with the
battleship USS OHIO that was at an unknown location at sea somewhere
within a 100 mile semi-circular radius east of Norfolk and then to
return, by Radio Compass navigation, to Norfolk. The USS OHIO was
equipped with radio transmitting equipment and was sending out a
"beacon" signal that the F-5-L received within minutes of becoming
airborne. Once the bearing was established, the flying boat then flew in
that direction for 90 minutes before sighting the USS OHIO at just under
100 miles off shore. The F-5-L crew circled the USS OHIO several times
and then proceeded to use a land-based Navy radio beacon to navigate
back to Norfolk. The demonstration proved that air navigation by "radio
compass" was practical and needed to be developed further. The Curtis-Felixstowe
F-5-L was a large flying boat powered by two Liberty V-12 engines and
piloted by a four man crew. The navigator was usually up front since at
that time most aerial navigation was visual. Just in front of the wings
was a double-cockpit for the pilot and co-pilot. Behind the wings was
the radio operator's position. The radio gear was mounted inside the
cockpit in a recessed area protected from the open cockpit environment
but still accessible for the radio operator. It's unknown where the loop
antenna was mounted.
The battleship USS OHIO had been decommissioned in 1918 but was put
back into active service at the beginning of 1919 and sent to
Philadelphia. It was used by the Navy for several experiments involving
radio signals for uses other than communications. Besides the Radio
Compass experiment, the USS OHIO also was part of an experiment to use
radio to remotely control the operation of a radio-fitted target ship
(using the old USS IOWA.) The experiment was to have the USS OHIO use
radio signals to remotely operate and thus remotely "tow" the USS IOWA
from Philadelphia to Hampton Roads, a task that was performed
successfully. Due to its smaller size and age, along with its slow
maneuverability, the USS OHIO was again decommissioned in 1923 and sold
for scrap.
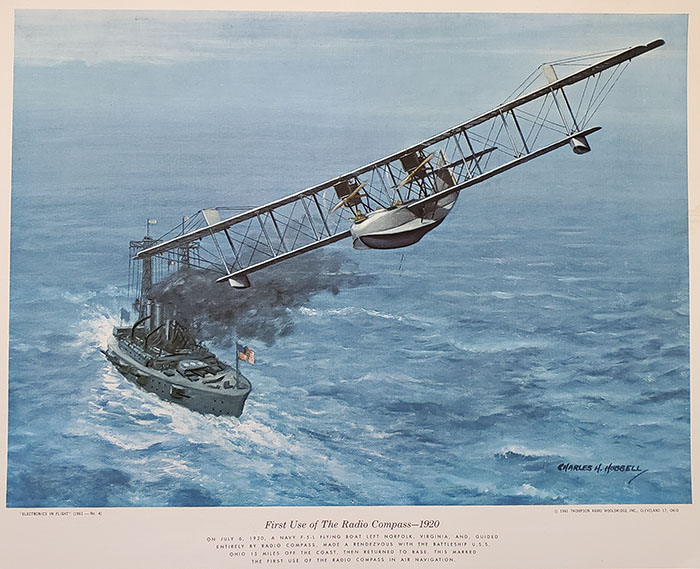
Shown in the header photo is an artist's depiction of the Radio
Compass event titled "First Use of The Radio Compass - 1920."
Charles H. Hubbell was a famous "aviation" artist who supplied the
artwork for a series titled "Electronics in Flight" that was done for
Thompson-Rand-Woolridge, Inc. in 1961 as part of a group of
aviation-theme calendars. The calendar write-up that is below the
artwork erroneously states the USS OHIO was 15 miles off shore. Had that
been true, the crew of the F-5-L could have easily visually spotted the
USS OHIO once they were aloft. The misprint probably was intended to
read "95 miles." The entire write-up is below the artwork.
Department of Commerce - Bureau of Airways
- Before 1925, nearly all air navigation was visual. Well-known
landmarks were used, rivers followed, the few major roads were sometimes
used as navigation landmarks. Airmail pilots were sometimes delayed when
weather conditions obscured sighting landmarks that they used to
visually follow their flying route. Some early air navigation aids were
the large white arrows (usually made out of concrete) that were
ground-mounted and placed in remote areas pointing the way to a specific
airport. Later, large rotating beacon lamps were installed on towers
usually in the same locations as the white arrows as navigation aids for
night flying or poor visibility conditions. Navigating by Dead Reckoning
was limited by the accuracy of the available instruments.
Early Airborne Navigation Radio Receiver
Indicators - In 1926, the Department of Commerce, in
charge of commercial flying through the newly created Bureau of Airways
and Navigation, began to implement methods and equipment to utilize
radio stations at airports to provide navigation information for pilots.
The initial system was a non-directional radio beacon at the airport
that provided a radio signal that allowed a pilot to use a radio to
listen to the signal strength, try to determine the strongest signal
response (by changing the airplane course.) The strongest response would
generally indicate the correct direction of the airport. This system
wasn't very accurate, it was difficult to use and it was thought that a
visual indicator would be an improvement.
By the late-twenties, the airport radio beacon system had improved by
using a directional beacon that employed an Adcock directional antenna
that was comprised of four vertical towers in a 425' square with
antennas in each corner. One transmitter would feed two diagonal
antennas transmitting a signal modulated with 65hz and a second
transmitter used the remaining two diagonal antennas sending an 85hz
modulated signal. The antenna radiation pattern was a large "four-leaf
clover" with the four main lobes providing the strongest signal and the
minimum signal was between the lobes. The aircraft had to fly in the
direction of the airport and on the correct minimal signal null (between
the lobes.) The aircraft receiver-indicator was a system that used
vibrating reeds within the pilot's instruments to indicate direction.
The visual indicator would show equal vibration height of both reeds if
the airplane was flying directly "on the beam" since both transmitted
signals were at minimum. But, if the airplane drifted to the right then
the 65hz reed increased in height because that radiation pattern lobe
was being flown into. If the airplane drifted left then the 85hz reed
with increase in height for the same reason. Which ever reed was showing
increased vibration indicated to the pilot if he had drifted to the
right or the left of the beam. The pilot had to fly in the proper
direction of the airport and maintain the reeds equal in height to
successfully navigate to the desired airport. The reed tips were painted
white for increased visibility within the indicator. By the
mid-thirties, the vibrating reeds were being replaced with more modern
systems of navigation that allowed the airports to use the same basic
type of directional antenna system for beam navigation but the
improvements were made to the transmitters used and also to the airborne
DF equipment being used.
Radio Range Beacon Signals, Airport Range
Beacon Antenna Systems - By
the mid-to-late 1930s, navigation from one airport to another airport
involved flying the aircraft on a specific course at a specific altitude
that was called an "Airway." The Airway was defined by Radio Range
Beacons that were located at major airports and sometimes by Remote
Radio Range Beacons that were in areas that were out of the range of any
Airport Radio Range Beacons. Most Radio Range Beacons were able to be
reliably received by aircraft out to a distance of about 50 miles. A
major airport Radio Range Beacon would have more powerful transmitters
and could be received out to 100 miles or more. The intersection of two
different Range Beacon beams from two different airports could span a
distance of up to 200 miles although most intersections were somewhat
less than the maximum with 100 miles being average. Where the distance
between two airports exceeded 200 miles then a Remote Radio Range Beacon
station was sometimes installed to provide more consistent coverage.
Where no Remote Range Beacon was installed the pilot had to know where
the next Airway Range Beacon "beam" was using the navigation chart and
then plot a heading to that point to intersect the next beam along the
course. Well-travelled Airways, mainly in the Eastern part of the USA,
would generally have consistent Radio Range Beacon coverage but, in the
Western USA, consistent coverage was provided only on the busiest
Airways.
|
Each Radio Range Beacon sent out a
specific type of signal radiation pattern that was created by the type
of antenna system used. The two types of antenna systems were the "Loop"
which consisted of two large 300' long rectangular loops that
center-crossed each other at right angles and were mounted about 30 feet
high. The other type was the Adcock Tower antenna system that consisted
of four 125' tall towers arranged in a 425' square with a tower in each
corner. Although the Adcock four-square tower system can be used for
DFing when combined with a goniometer, if the antennas are used as
phased transmitting towers they create a specific type of radiation
pattern (four-leaf clover pattern.) These tower antenna systems were
sometimes called Modified Adcock Tower Antenna Systems or sometimes
Range Tower Antenna Systems. The feedlines to these antennae
were buried to help prevent skywave radiation and assure the the
radiated patterns were accurate and consistent. The Radio Range
transmitter was located in a building at the center of the square.
An additional communications transmitter used a fifth tower in the
center of the square that operated a different ground-to-air frequency
than the Range Beacon used and was for weather announcements or voice
communications to incoming airplanes.
The Radio Range transmitter energized the Adcock
"beam" antenna with a transmitter that operated in the 200kc to 400kc
frequency range and was automatically keyed to produce a continuous
string of dots and dashes. The output of the transmitter went to an
automatically timed electronic switch that would allow a dot and a dash
to energize one loop or one diagonal pair of towers to produce an "A"
and then would switch to the other loop or pair of towers to allow a
dash and dot ("N") to be sent.
|
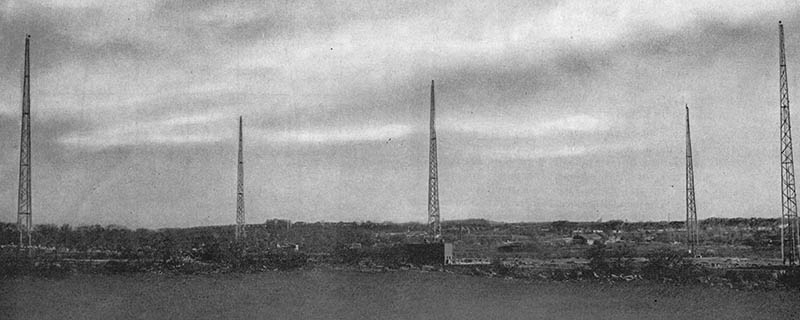
photo above: Maspeth
approach to LaGuardia Field, NY showing the five tower Range
Range Antenna system in 1943. Installed by Radio Receptor Co. -
photo from "Highways of the Air" |
The orientation of the two loops or the
two diagonal pair of towers caused a "four-leaf clover" radiation
pattern to be produced which resulted in four "nulls" in which the
signal strength of the "A" and the "N" were equal and resulted in a
continuous tone at the aircraft receiver. Each null or "beam" was 3º
wide and, as mentioned, the signal could extend out an average of 50
miles and to over 100 miles for major airports. If the incoming airplane
drifted off the "beam" one of the four-leaf clover antenna pattern lobes
would become stronger and the pilot would begin to hear that letter much
stronger and the other letter much weaker. As the airplane drifted more
off the beam, the stronger letter would dominate. The normal procedure
was that the "A" and "N" beams would combine when the airplane was "on
the beam" and a continuous tone was heard although this information was
only transmitted for around 30 seconds, then the Range Beacon's callsign
was sent on the A loop and then on the N loop, then a long pause and
then all of the information sent again (this format was continuously
repeated.) The navigation charts would indicate the orientation of the A
or N relationship to the four beams and that would indicate to the pilot
or navigator which way the airplane had drifted allowing him to correct
his course back onto the beam. As the pilot proceeded on course, when
the airplane crossed over onto another Radio Range station signal the
right-left orientation of the A and N would change because the airplane
was headed away from the previous beacon and was now heading into a new
beacon. This orientation change was shown on the sectional charts so the
navigator or pilot would know and instantly recognize they were then
correctly proceeding on the next Radio Range beacon and the callsign ID
from the new beacon would verify the correct airway.
Many installations required adjustment
to the radiated pattern due to the local terrain (to avoid mountain
ranges or nearby hills along the course, for instance.) Sometimes in
order to intersect with other Range Beacon beams, the radiated pattern
required some directional adjustment. Usually a goniometer or a vario-coupler
was used to alter the radiated pattern from one lobe or the other to
adjust the pattern by "bending" the radiated "beams" as needed.
Sometimes when only one beam needed to be adjusted, an excited parasitic
antenna was placed within the antenna field to alter the radiated
pattern of the desired lobe.
Position Markers, Fan-Markers,
Cone-of-Silence Markers, Rotating Lamp Beacons
- Since following the "beam" could result in the aircraft traveling
perhaps as far as 100 miles, Position Markers were sometimes installed
at various distances along each beam. Most position markers by 1940 were
upward radiating VHF signals (most were on 75mc.) When received as the
airplane passed overhead, the signal would be of very short duration so
usually the marker signal would be modulated in a manner to actuate a
switch in the radio gear that turned on an indicator lamp. Earlier
position markers were designated as "M" markers and usually were on an
adjacent frequency to the Radio Range Beacon and usually sent the same
Morse ID call that the Range Beacon did. Because of the slightly
different frequency and the lower power of "M" markers, they were easily
identified by pilots. "M" markers were usually shown on nav-charts
indicated by a circle with a "M" inside and the frequency of operation.
Fan-Markers were 75mc VHF position markers that were generally located
mid-way along the airway beam or sometimes at locations where a
different Radio Range "beam" intersected the beam being flown with the
object being to specifically identify the beam that the pilot should fly
on to stay within the Range Approach Channel (the flight corridor) to
the airport runway. Sometimes Fan-Markers were placed to warn about
obstructions ahead or to indicate the airport approach. Some Fan-Marker
installations also had rotating lamp beacons and course lighting to
visually aid the pilot as he approached the airport. Fan-Markers
antennas produced a radiated pattern that resembled an "open fan" inline
with the beam which allowed the pilot enough time to receive the
information being transmitted as the airplane flew over the marker.
Fan-Markers were usually shown on nav-charts as medium-size ellipses
along the beam indication with the marker ID (usually a single letter
sent in Morse) shown along side the ellipse.
Cone-of-Silence markers were located at the airport. As the airplane
approached the airport, the "beam" signal would begin to "break up" at
about one thousand feet out and could not be received at all directly
over the airport. Cone-of-Silence markers were VHF transmitters (75mc)
with an antenna that radiated a cone-shaped signal upwards with a
modulated 3000hz tone that usually triggered an indicator lamp on the
radio gear. The Cone-of Silence signal range depended on the aircraft
altitude but at 5000 feet altitude the signal could be received out a
little over 2000 feet. At 1000 feet altitude the range was about 1200
feet. The Cone-of-Silence generally indicated that the pilot was going
to "over-shoot" the runway and should prepare for a turn after passing
over the airport.
Usually, along the Airway course there were several rotating beacon
lamps to aid in visual navigation at night. As mentioned, many times a
rotating beacon lamp was also located at a Fan-Marker position. Some
beacon lamps blinked in Morse to identify themselves and these types
would have their Morse ID indicated on the Nav-chart. Sometimes there
were also Inner and Outer Marker Beacons that were VHF types of position
markers that indicated the distance to the runway of the airport mainly
to help the pilot with the landing approach. Also, most airplane to
tower communications were beginning to use VHF by about 1940 (128mc to
132mc at the time) but also had MW and HF capability (tower frequencies
were indicated on the nav-chart.)
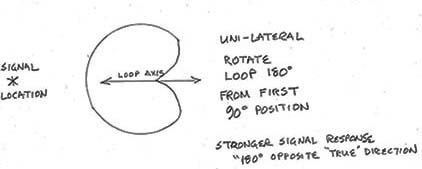
Right-Left Indicators
- Some Radio Compasses utilized a visual indicator to show direction of
drift off of a beacon signal that was being used for homing. Generally,
the Right-Left Indicator was a center-zero meter that would be driven by
the radio circuitry to move down scale (to the left) or up scale (to the
right) in response to signal changes from the loop and sense antenna.
The design used the omni-directional sense antenna's phase relationship
to the variable phase relationship of the loop. At a loop null, the
phase difference between the sense antenna and the loop is 90º but
switches rapidly to 180º off the null. The induced signal voltage to the
loop is at maximum when the loop axis is inline with the signal. When
the loop is perpendicular to the signal the induced voltage is at
minimum on either side of the loop. Within the Radio Compass circuitry,
the loop input goes through an RF amplifier with a 90º phase-shifter
circuit and into a dual balanced modulator (a dual triode circuit) that
also has a 48hz audio oscillator driving one side of the balanced
modulator. The output of the balanced modulator is inductively mixed and
connected to the sense antenna where it is then fed into the RF
amplifier of the receiver. From the detector/AVC/1st AF circuit of the
receiver the signal is routed to a 48hz AVC amplifier and a Compass
Output stage and these two signals are inductively coupled to the R-L
meter. The R-L meter is a special dual coil unit (dynamometer) with a
field coil and a moving coil. Since the field coil is driven by the 48hz
audio oscillator and the phase shifter/balanced modulator is also driven
by the 48hz audio oscillator driving the moving coil, when the loop is
at a null the phase difference is zero and the meter stays at center. If
the airplane drifts "off the beam" it appears to the Radio Compass
circuitry that the loop has changed position and thus the phase changes
with the result that the R-L Indicator moves to either the right or the
left depending on where the beacon is in relationship to the airplane's
new course. By keeping the R-L Indicator needle centered, the pilot or
navigator was assured that the airplane was flying "on the beam."
NOTE: This is a description of how the Bendix Radio Compasses
functioned.
Finding the Aircraft's Position
- Most of the time, an airplane flying in an Airway to a known
destination was always having its position known and logged by Air
Traffic Control associated with the various Airports and certain Radio
Range stations. Usually, this information was automatically exchanged
with the flying airplane as it passed certain Radio Range stations.
Information on "fixes" were exchanged between Air Traffic Control
centers and Radio Range stations most of the time, so usually the pilot
and Air Traffic Control knew where the airplane was at all times. If the
airplane was not flying "on the beam" but was at an unknown position for
some reason (like out at sea flying towards the coast) it was relatively
easy for the pilot or navigator to quickly get a "fix" on the airplane's
position. Using the Navigation Chart, an appropriate beacon was
selected. The nav-chart showed the location, frequency and call of the
beacon so tuning it in on the DF receiver was easily accomplished. Using
the Homing loop a bearing was taken on the null (it didn't matter which
null was selected) and a line drawn on the chart referenced from the
beacon's location. Then another nearby beacon from a moderately
different location was selected, tuned in and a bearing determined. When
the second line was drawn on the chart, the point of intersection of the
two lines indicated the airplane's position. This was relatively
accurate but since the airplane was traveling in a specific direction at
flight speed, the faster the triangulation was performed, the more
accurately the position could determined. AM-BC stations were usually
shown on nav-charts because their strong carrier signal could easily be
used as a beacon for Homing or for triangulation. In some areas during
WWII an Army Air Forces (AAF) aircraft could radio they needed a "fix"
at which point a AAF master control station would quickly start the
process and the aircraft's position was then radioed back with the
suffix QTF to identify the message. An aircraft could also request a
magnetic course steering (QDM) or a true course steering (QUJ) and the
master control station would start the process of a course change
calculation (either referenced to magnetic compass QDM or referenced to
true north QUJ) that was then radioed back to the aircraft. There were
other methods (non-radio) also used to determine position that involved
measuring the sun's position versus the time of day and course
direction. Stars could be used if the airplane was flying at night.
|
Aeronautical Navigation Charts and
Computers
- There were different charts for daytime or nighttime flying with
different map projections, e.g., Mercantor for nighttime flying and
Lambert for daytime flying. Mercantor projections are purposely
distorted to present square map grids but as the distance increases the
distortion errors increase and a correction factor had to be added or
subtracted to the course. The nighttime charts were simplified with no
landmarks shown other than those that would be visible at night.
Additional information shown on navigation charts included marine beacon
calls and frequency, weather station calls and frequency, AM Broadcast
station calls and frequency, general terrain and elevations, latitude
and longitude, major visual navigation points (roads, railways, lakes
and rivers,) other visual indicators such as tower lights that included
rotating lights, lights that blinked Morse, or other types of lighted
beacons. By the early 1940s many nav-charts would show a Range Approach
Channel that was a corridor that pilot was to stay inside of while on
the "beam" as the airplane approached the airport and runway. Some Range
Approach Channels would intersect with different beams and channels if
the course required the pilot to make a turn onto another beam to follow
to a specific approach to the airport. Generally, if the chart was
intended for in-flight use it would be an Air Navigation Sectional Chart
that covered about a 300 mile "section" of a specific area of land with
many details about airports, beacons, topography, etc., to aid flight
navigation. If the chart was intended for ground use or reference for
flight planning it was a Radio Direction Finding Map which covered a
much, much larger area (like the entire Southwest or the entire
Northeast of the USA) and the details were more general, usually showing
Radio Range Beacons but not showing the A or N quadrants. Markers,
course lights, lamp beacons, etc. likewise, were not shown since the
scale of the map covered such a large area.
Navigators usually were equipped
with several types of tools that were usually kept in a kit and included
many types of scales and protractors with articulated pointers, usually made of
transparent plastic, for placement on top of charts. Also included were
various types of calculators (sometimes called "computers" but most were
like circular slide rules and able to perform several calculations or
conversions simultaneously.) Some tools had combinations of transparent
articulated pointers and sliding scales for calculating variables or
position. These calculators, scales, protractors and conversion tables helped to
speed-up the process and hopefully increase navigation accuracy.
photo right: A "Time-Distance"
computer, Type D-4, from WWII, for the USAAF.
Diameter of this device is 4 inches. There are more computation scales
on the backside of this Type D-4 computer. |
 |
|
Aeronautical Charts - 1938 to 1947 |
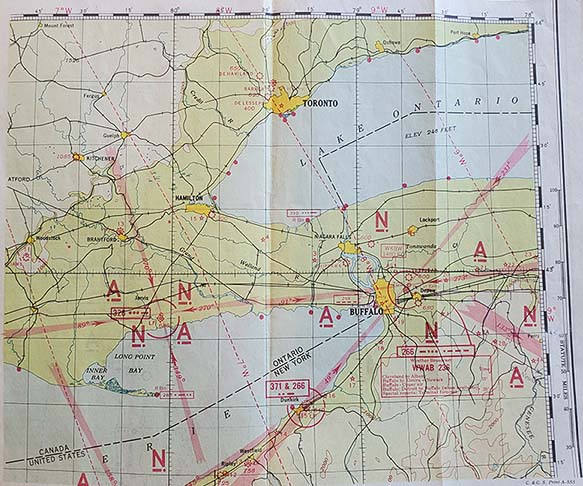 |
1938
Air Navigation Chart
1938 BUFFALO, NY
area. The Range Beacon "beams"
are shown as four light-red spokes emanating from the airport
location. Note how the Buffalo Airport's Range Beacon antenna
pattern has been "bent" to match other Range Beacons in the
area. Also, note that the course approach bearing is shown in
degrees inside each spoke and each quadrant has the A or N
identification shown. Each airport beacon also has the frequency
shown in kilocycles and the call shown in Morse.
Note that Buffalo AP Range
Beacon is on 266kc and the call is
BJ
shown in Morse. Also,
IT
at Dunkirk is a Position Marker that indicates another beam's
intersection on the
BJ
49º approach beam. At this time in 1938, the Position Marker (if
even present) would send its call on both 371kc and 266kc. VHF
was used for Markers by about 1941.
Also, note that weather broadcasts are on
WWAB
on 236kc.
WKBW
1480kc is an AM-BC station shown north of Buffalo.
Magnetic Variation is shown as the dotted arced red vertical
lines with degrees and direction indicated. Magnetic Variation
is also shown in red within the latitude and longitude markings
on the map's edges.
Stars, solid circles and spoked wheels indicate visual beacons
such as rotating lights, etc. Star within a circle indicates a
marine beacon with call and frequency shown within a rectangular
box. Most nav-charts contained a wealth of information for the
pilot and navigator. |
|
1943 Air
Navigation Sectional Charts |
|
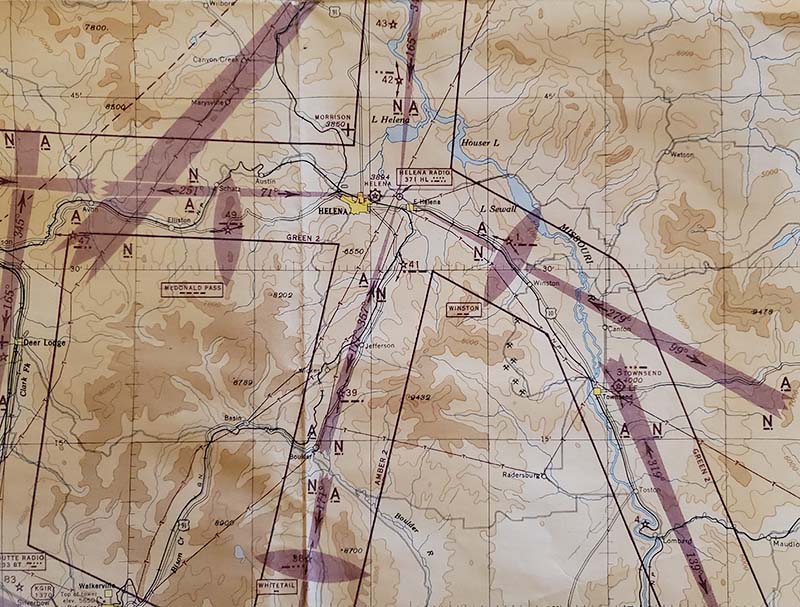
1943 HELENA, MONTANA
area. AP Radio Range Beacon is HL on 371kc. The ellipses indicate a Fan
Marker on 75mc indicating either airport approach or other information.
Almost all of the Fan Markers will also have a rotating lamp beacon at
the marker location and course lights. North on 165º beam note rotating
lamp beacon 42 with the Fan Marker "U" and also East on 279º beam a
similar lamp beacon with the Fan Marker "W" identified as 1. These lamp
beacons associated with Fan Markers also had course lights showing the
pilot the runway direction. Note the Radio Approach Channels are
identified by colors, e.g. GREEN 2, AMBER 2, etc. Each beam has the A or
N quadrant identified. Most of the beams intersect with beams from other
Radio Range Beacons to provide the pilot with almost constant navigation
direction signals. The dotted line in the upper left indicates Magnetic
Variation which in this area was 20ºE. Stars indicate a lamp beacon.
Stars with arrows indicate a rotating lamp beacon with course lights.
Gear-shaped circle indicates an airport. Note that TOWNSEND "V" is a
lamp beacon with course lights but not a Fan Marker. The course lights
directed the pilot to the intersection from 319º from Bozeman to 279º
from Helena. Airport elevation is the italic number. Various shades of
brown colors indicate elevation between 3000 and 5000 feet. Charts had
to be carefully studied before the flight began since so much
information is presented on each chart. This is just a small area of the
particular sectional Air-Nav chart which is 42" x 24" in size. |
|
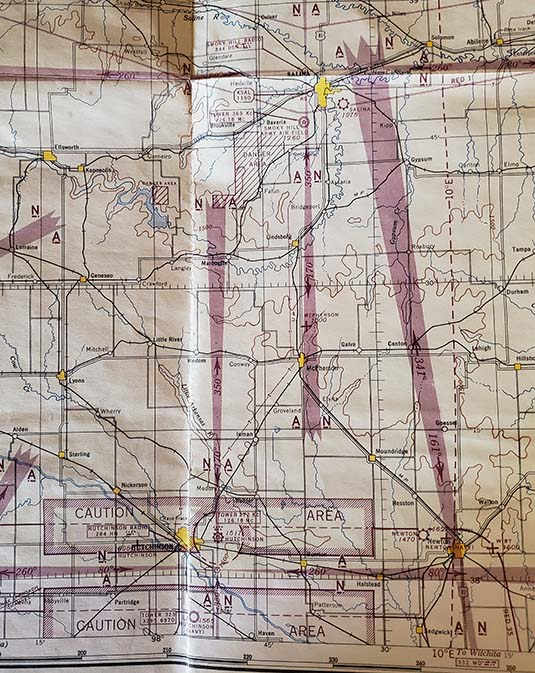
1943 SALINA, KANSAS area showing
Salina AP, Smokey Hill Army Air Field, Hutchinson AP and the Hutchinson
Navy Air Base. The shaded borders marked CAUTION AREA indicate that the
pilot should avoid this area, if possible. Note that near Salina is a
marked DANGER AREA southwest of the Smoky Hill Army Air Field indicating
this area is not to be flown over. The Hutchinson AP Tower is on 272kc
and on 126.18mc while the Radio Range Beacon is on 284kc with the call
HS. Note that west of Salina is an AM-BC KSAL station tower operating on
1150kc. Since the elevation in Kansas is between 1000 feet and 2000 feet
the map color is white. This Aeronautical Navigation Section Map
measures 42" x 24" and covers the central portion of Kansas. These
Section Maps might seem large for single seater airplanes but the pilots
had their routes planned and generally folded the map up with just the
necessary areas showing. In larger planes with navigators it might have
been possible to have the map fully unfolded. |
|
1947
Aeronautical Map for Radio Direction Finding |
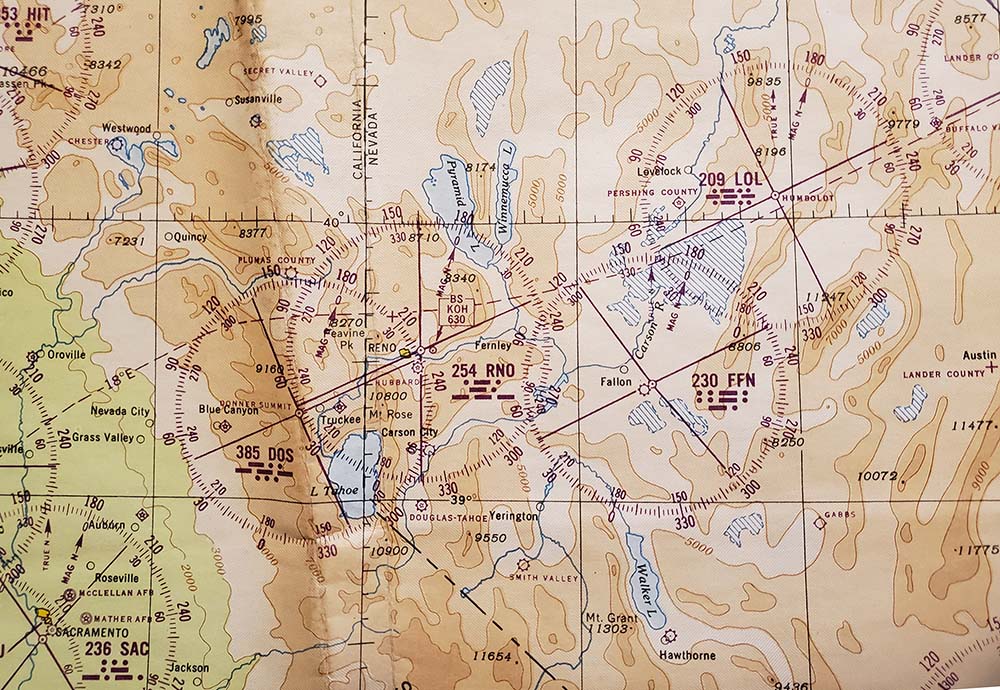
| 1947 RENO,
NEVADA area.
Reno AP Radio Range Beacon is
RNO
on 254kc. Note that the AP is "Hubbard Airfield" which was at
sometime purchased by United Airlines and then sold to the City
of Reno in the 1950s.
KOH is
shown on 630kc - on that frequency from 1940 up to about 1990
(now on 780kc.)
LOL
on 209KC was a Remote Radio Range Beacon located east of
Lovelock, Nevada.
FFN
on 230kc was the Radio Range Beacon SE of Fallon, Nevada
Of interest is the Remote
Radio Range beacon located on Donner Summit
DOS
385kc.
Radio Range Beacon patterns
show the four beams within a 360º compass rose with 0º
indicating magnetic North. Beams could be the referenced to the
compass rose shown to indicate the beam heading. Note that both
Magnetic N and True N are usually shown on the compass rose with
True N plotted for the magnetic deviation. The dotted red line
indicates Magnetic Variation which is 18º E in this area.
Circles with stars inside
indicate a military air base, e.g., McClellan AFB or Mather AFB
near Sacramento. Gear-shaped circles indicate a municipal or
commercial AP.
This map is for the entire
Southwest US so only a small portion is shown in the photo. Much
larger areas are shown in Radio Direction Finding Maps compared
to Navigation Sectional Charts since the DF Map isn't
necessarily for in-flight navigation. Also, DF Maps won't have
the A or N quadrants indicated on the compass rose of each Radio
Range Beacon for the same reason. The elevation is indicated by
color with browns being above 5000 feet. Note that below 3000
feet is green (Sacramento.) The entire map measures 36" x 26"
and the map grid is shown in the Lambert projection.
Radio Range Beacons started to
be replaced with the VOR navigation system by the early-1950s
and very few Radio Range Beacons were left by the 1960s. |
 |
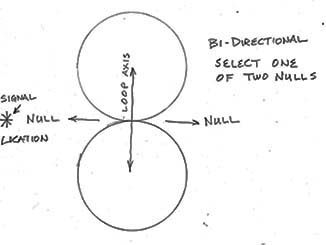
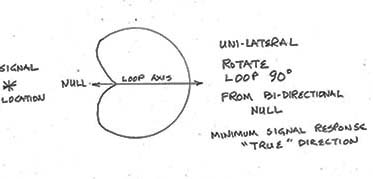
"Homing" Bi-lateral Directional
Uses - When the
aircraft was flying towards a "known location" beacon, then Bi-lateral
(aka: figure-8 pattern)
was used and the loop locked in position perpendicular to the fuselage (athwartship)
and the airplane course determined by steering the airplane in the
direction of the bearing of the minimum signal response. This was called
"Homing." An Audio Output Meter could be plugged into one of the
aircraft receiver's phone jacks to use as a visual indicator of minimum
signal response. Since the Range Beacon's call and location were shown
on the navigation charts, Bi-lateral allowed "beam navigation" and kept
the airplane on course within a defined "Airway" to the airport or city
that the beacon was transmitting from. The "Airway beams" locations and
bearing directions were also shown on the navigation charts along with
the "between the beams" signals of "A" and "N" Morse (MCW) identifiers
to indicate via the radio signals and by the navigation charts where the
airplane was in relation to the four fairly narrow navigation "beams"
from the Airport Range Beacon transmitter/antenna system. The "A" and
"N" beam loop IDs would combine when the airplane was "on the beam" and
a continuous tone was heard although this information was only
transmitted for around 30 seconds, then the Range Beacon callsign was
sent on the A loop and then on the N loop, then a long pause and then
all of the information sent again (this format was continuously
repeated.) Non-directional Beacons could also be used for "homing" in
the same manner. AM Broadcast stations were often used as homing beacons
where there weren't any Range Beacons (like out at sea coming into
land.) Most AM-BC stations were shown on the navigation charts with
location and frequency for just such purposes.
Dead Reckoning
- Only the largest and busiest Airports had all of these types of radio
navigation installations. Small airports might only have a radio beacon
like a non-directional beacon that allowed a pilot to find the airport
using a "Homing Loop" type of navigation along with visual navigation.
Usually there was some type of ground communication although it might
not be with an airport tower. During WWII, a lot of air traffic in the
USA used Airways navigation but in other countries or perhaps small
islands only small temporary or "make-shift" runways might be used.
Navigation in these areas might be able to rely on crude beacons or
other methods to determine the runway's location from some distance out.
With small runways without beacons or in other types of flying that
might be reconnaissance or similar missions, the pilot or navigator
could plot a course to that airport or area and then use "Dead
Reckoning" to fly there. Dead Reckoning used the plotted bearing, the
calculated distance, the air speed, the altitude, any crosswinds and the
aircraft's magnetic compass to estimate a fairly accurate course to the
small airport. Once on course, then visual navigation could also be used
and landmarks shown on the navigation charts could be used to verify the
course accuracy.
Other Systems Used During WWII
- Most bombing missions were navigated by Dead Reckoning in that from
the airbase where the bombers took off to their destination was a
specific course that was determined in advance. The course would require
corrections and may require bearing changes but most of that would be
predetermined. Besides the bearings and the airplane compass, air speed,
wind speed and direction, altitude and other factors were all needed to
determine target arrival time. General visual indications were used to
identify the target upon arrival during a daytime mission. The return
trip used other pre-determined courses with appropriate bearings already
known. This all worked fairly well if it was daytime. But, if at all
possible, nighttime bombing was more advantageous for the bombers since
it was more difficult to spot them in the sky. For nighttime bombing,
there were methods used by the Germans in occupied France during WWII
that utilized directional antennae with a very narrow beam that could be
aimed at cities in England. The German bombers would fly the "beam"
towards the target city and at a certain point along that beam an
intersecting beam sent from a second German station also in France would
indicate that the target city was directly ahead. Throughout Europe
there were MW-AM-BC stations, LW BC stations and various types of radio
navigation beacon signals being transmitted that could be used for
bearings. The airway beams used in Germany during WWII (and before) were
somewhat different than the Radio Range Beacons used in the USA. The
Germans transmitted very narrow beams on each side of the airport
runway. One beam sent only dashes, the other beam sent only dots. When
the approaching airplane was "on course" the pilot or navigator would hear a constant tone.
Any deviation right or left would result in hearing either dots or
dashes and the pilot could then correct as necessary. Nearly all of
these enemy navigation signal sources were known and the frequencies
with signal descriptions were published by the military in booklets for
reference by pilots and navigators. Of course, these signals could
change or they might also be deceptive in nature so while they were
generally "known" they were only used in emergency situations. The
pilots and navigators would rather rely on their own beam signals (if
any,) their own instruments and calculations for bearings and courses.
|